DEEP SUBMERGENCE VEHICLES | SHIPS | SEANET | SONAR | NAVIGATION
The technique is really quite similar to satellite navigation. Instead of orbiting satellites transmitting radio signals, sound-transmitting transponders are sent overboard and anchored to the seafloor. The positions of the transponders are determined by using the GPS system on board the ship and ranging to them acoustically while the ship circles where the transponder were dropped. The positions of the transponders on the seafloor are known with an accuracy of about 10 meters.
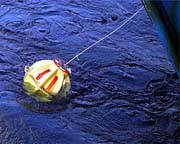 | |
| A transponder just after it is lowered into the water. The ship slowly moves away from it as the tether line is paid out. After all 185 meters of tether is paid out, the anchor is kicked over the side and the transponder sinks to the seafloor to start its work. |
To calculate the vehicle’s position, we use simple geometry and basic math. We know the speed of sound in water (about 1,500 meters per second) and the time it takes for signals from the transponders to reach the vehicle or the ship. Multiplying the travel times by the speed of sound in water gives us the distances between each transponder and the ship or sub. Using distance measurements from the ships and the transponders (triangulation again), computers can calculate the unique point in three-dimensional space where all distances measured from all the transponders and the ship intersect. That is where the vehicle is!
All of this happens very quickly thanks to computers and software written by oceanographic engineers and technicians so that we can constantly keep track of the deep submergence vehicle’s position within about 5-10 meters during a dive.